Overview:
In pursuit of enhancing robotics capabilities, I am engineering a semi-autonomous robot car fortified with ROS2. This robotic vehicle boasts multiple control modes. Initially, I incorporated Bluetooth-driven control using a PS4 controller in synergy with the robot's Raspberry Pi. However, the horizon holds grander visions—a GPS following mode that synchronizes with a companion device, conveying its coordinates via Bluetooth, thereby allowing the robot to track and follow with precision.
First Prototype:
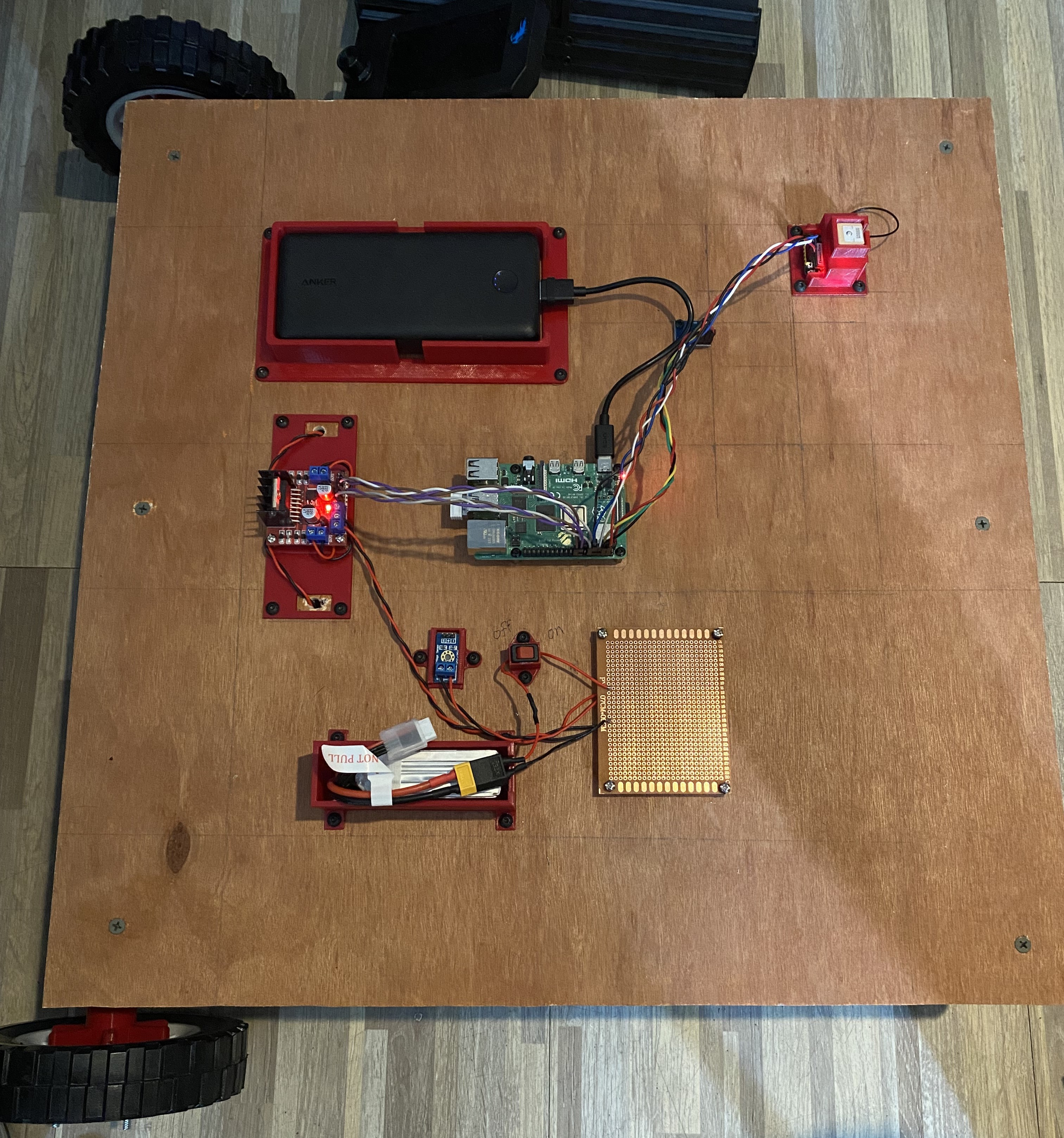
This wooden prototype encompasses various components—a Pi4 power source, a motor driver, an alternate battery for the motors, a voltage sensor, a dedicated on/off switch, and a GPS module. While this was a robust starting point, field testing unveiled its excessive weight as a challenge, leading to motor mount fractures and compromised speed.
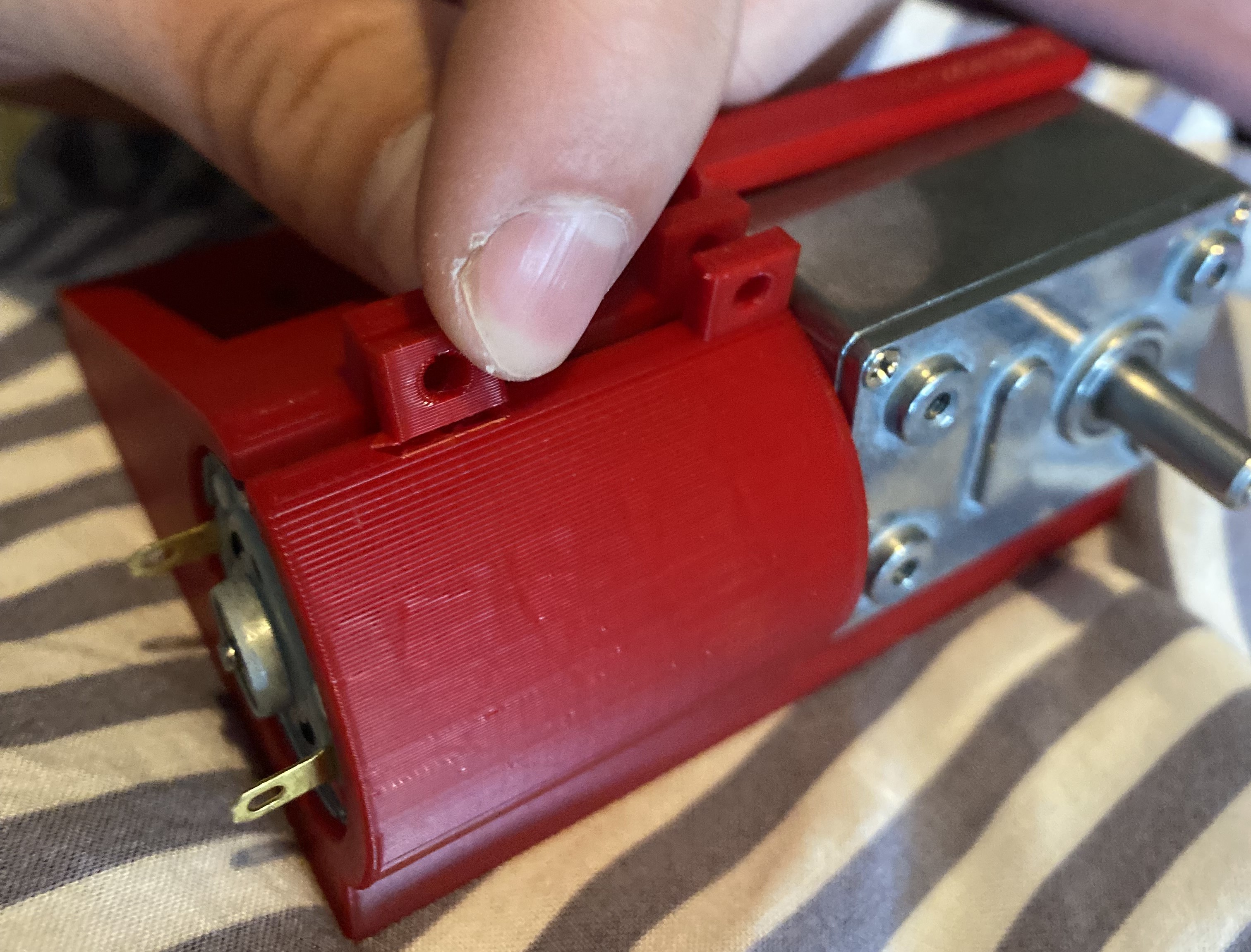
The root cause? A sharp-edged design which introduced stress concentration. An overhaul was in order.

Redesigned motor mount in Fusion360, addressing the stress concentration challenge with a fillet to enhance durability.
Second Prototype:
GPS/Wii Nunchuk Companion Device:
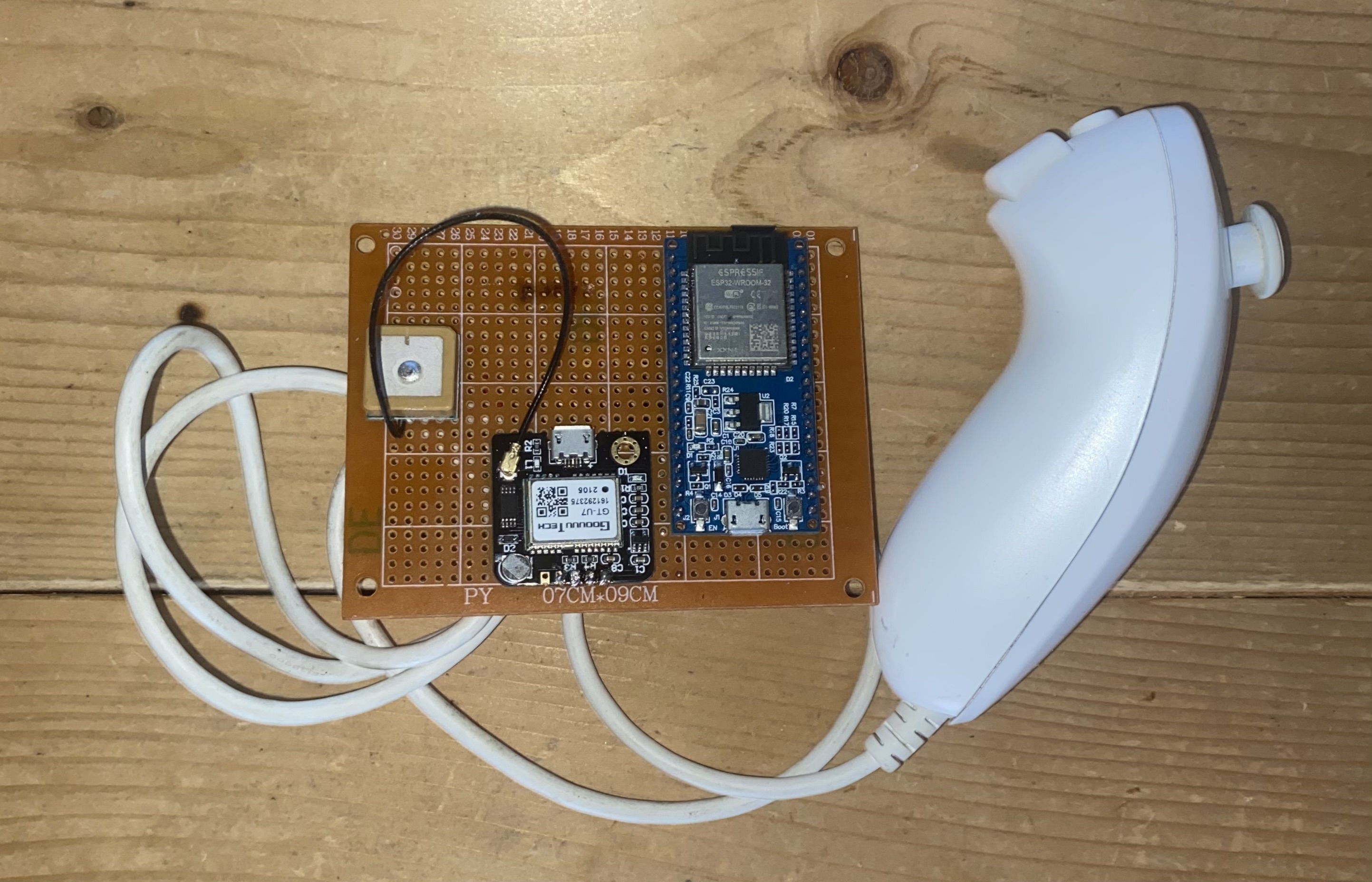
In the GPS mode, adaptability is paramount. To maintain Bluetooth connectivity while enhancing portability, I opted for the sleek Wii Nunchuk as the primary controller. Integrated with an ESP32, this mode is activated with a simple button press, seamlessly transmitting its GPS location to the robot.
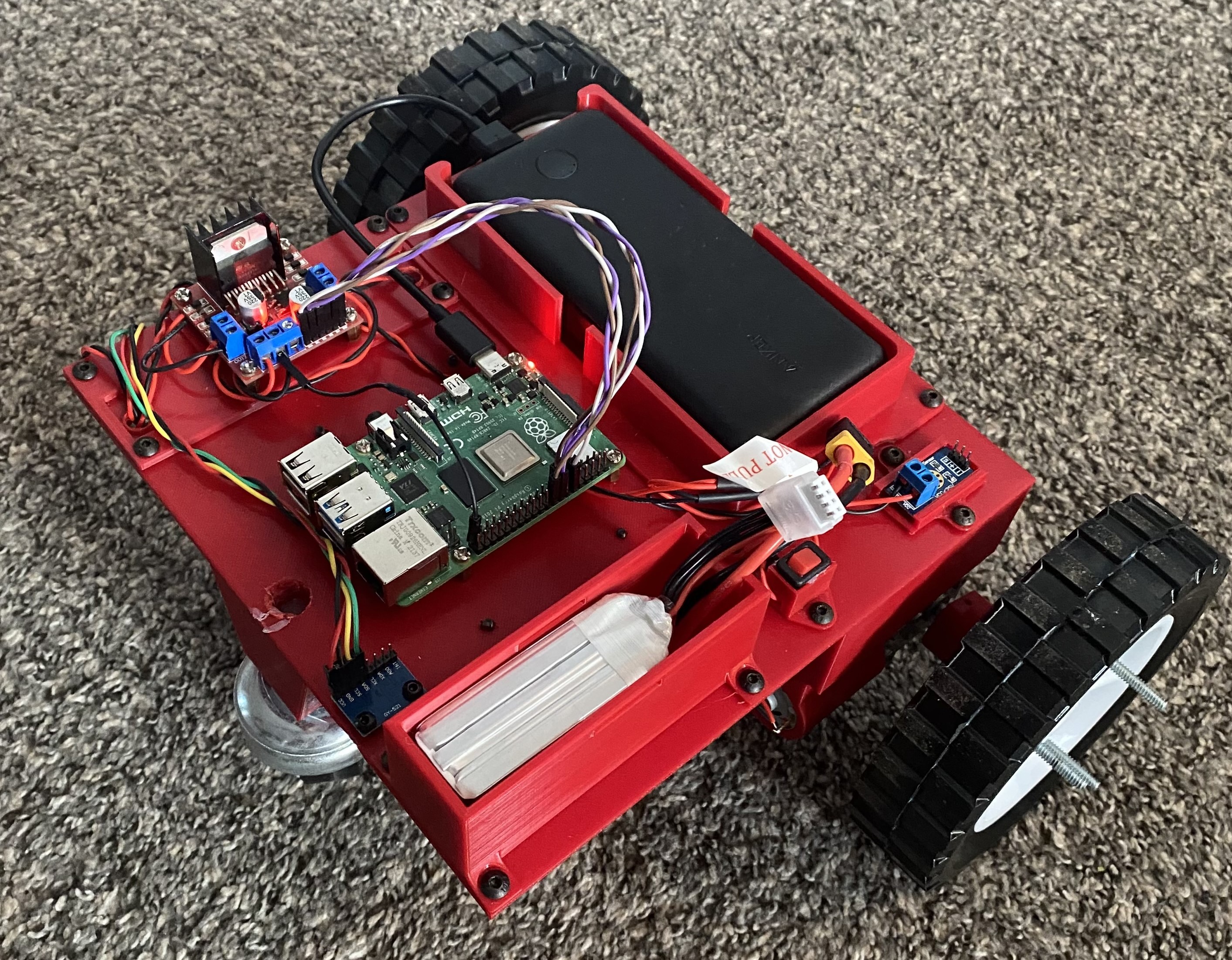
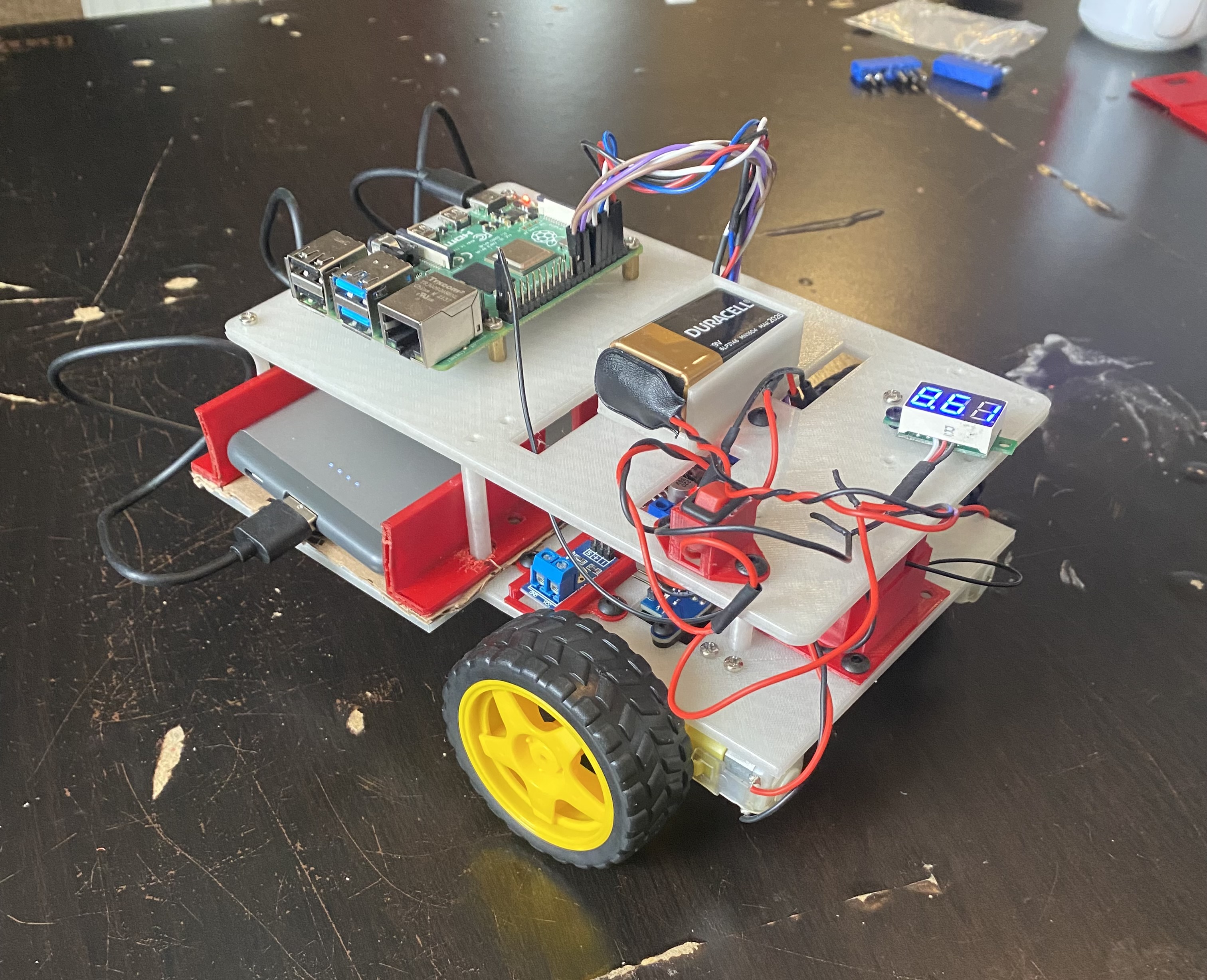
Third Prototype:
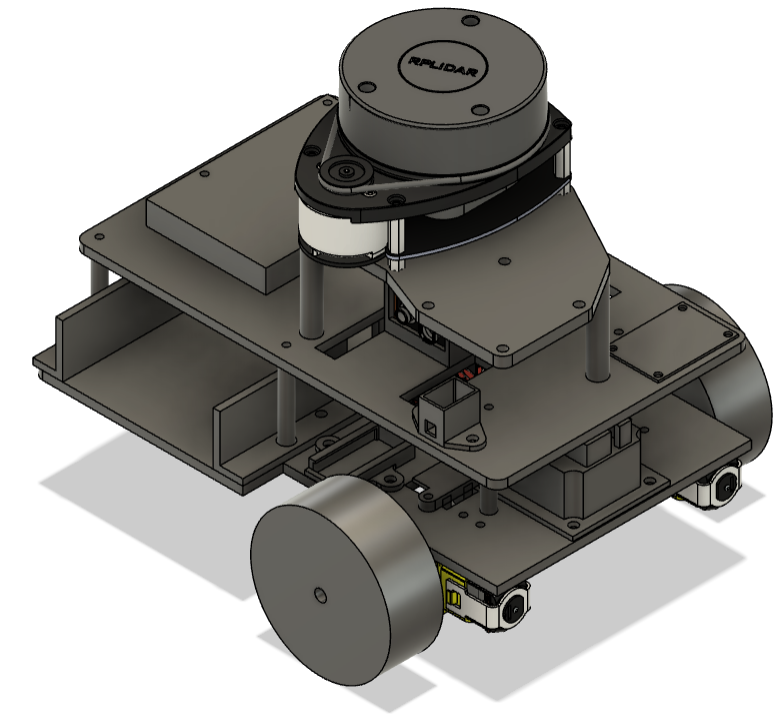
For the third prototype, I have decreased its size and weight for better motor performance. Additionally, I have included IR sensors for wheel odometry, and a LiDAR sensor and IMU for localization and mapping. I continue to refine my skills with 3D CAD utilizing Fusion360.
Shortly after recording this video, I tested the performance of the vehicle with both a 9V battery and a 3-cell LiPo battery using the remote control mode. The 9V works pretty well, and the 3S LiPo is almost too powerful. I fear the high voltage could burn out my motors. I am considering including a voltage regulator to supply 8 volts to the motor controller since this is the highest recommended voltage for my motors.
Next, I will integrate the GPS following mode and then assemble and test the LiDAR sensor.
Future Endeavors:
My aspirations encompass:
- Mission Planning Mode: The robot will be endowed with the capability to autonomously navigate a pre-decided GPS path.
- Obstacle Avoidance & SLAM: With a LiDAR sensor on board and the wheels equipped with rotary encoders, the robot will adeptly steer clear of obstructions. All these modes will converge harmoniously under the umbrella of ROS2.